Class Project
Background
The goal for this Robotics class project was to create an easily drivable car using a camera and an April tag. Using the camera, we had to learn how to translate the orientation (degrees) of the April Tag into motion for the car. We also had to create a Teachable Machines Pyscript page to start and stop the car with hands motions
Created a steerable car based on April Tag information collected by a camera
Final Design
Steering (My Role)
Turning the dowel rotates the camera which keeps track of it’s orientation in degrees relative to the AprilTag
The camera’s orientation is then advertised via MQTT (Wifi)

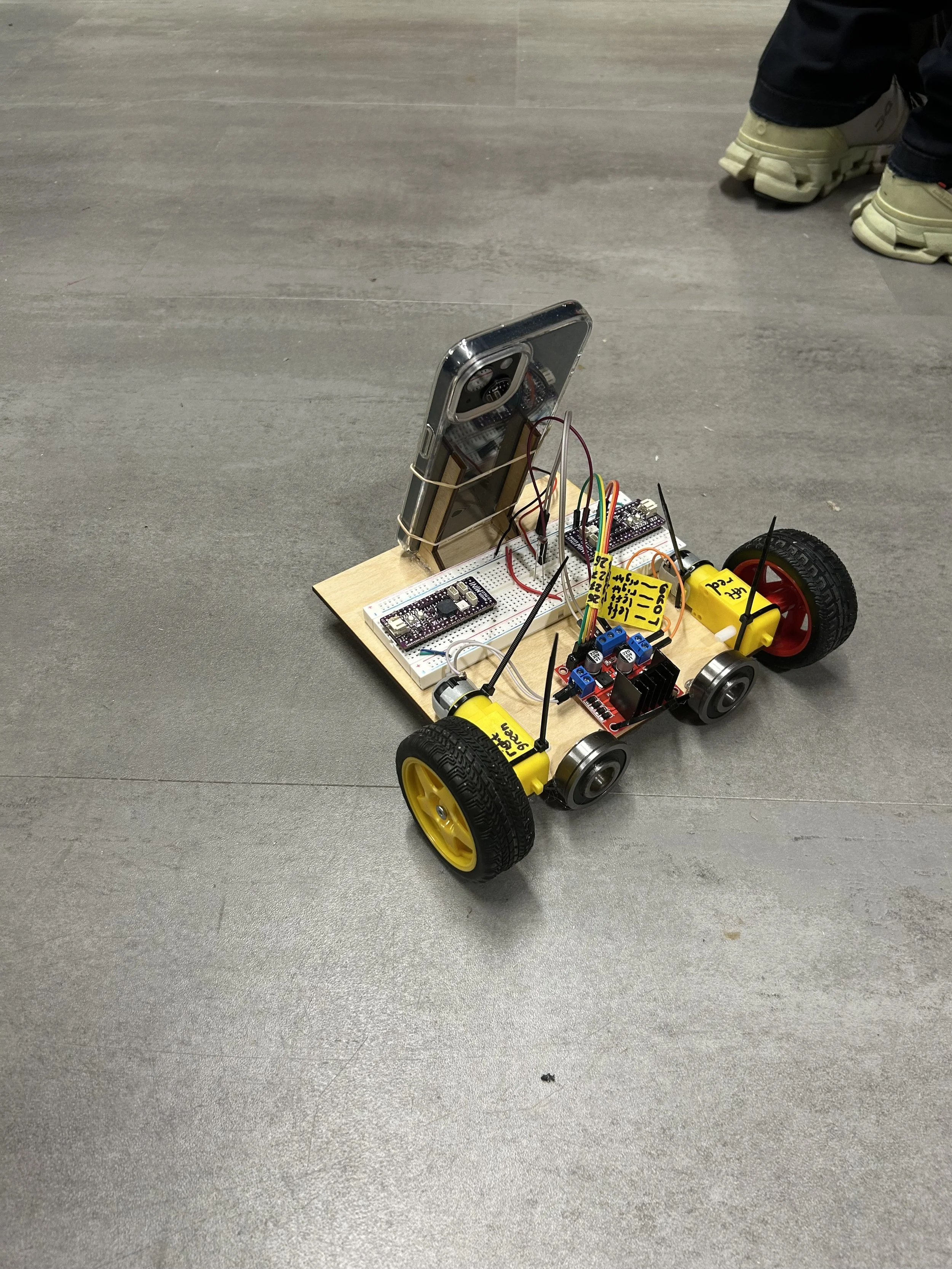
Car
A rasperbery Pi on the car receives the Wifi message and turns the camera orientation into wheel speeds
The phone on the car allows a real time first person driving experience via connection on zoom
Pyscript Page (My Role)
This Pyscript pages runs our Teachable Machines model and sends MQTT requests to the Pico on the car based on the hand signals we give it.
Outcome
We created an easily steerable car that was a lot of fun to drive!
We beat all of the other cars at sharks and minnows